 Image credit: IEEE Sensors Journal
Image credit: IEEE Sensors JournalAbstract
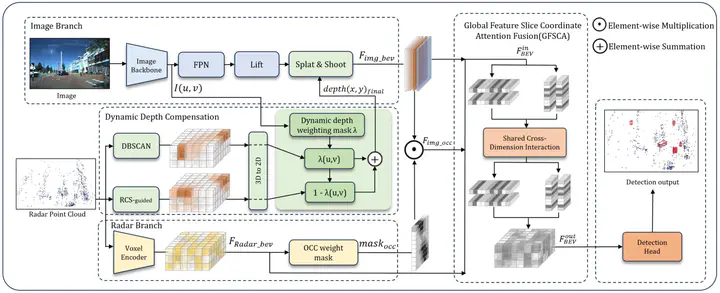
The effective representation and feature extraction from sparse point clouds of 4D millimeter-wave(4D-MMW) radar pose a significant challenge in 3D object detection. This paper proposes DDCFusion, a novel radar-camera fusion network that advances measurement precision by dynamically compensating for depth errors in sparse radar data. DDCFusion achieves this by exploiting the physical properties of 4D-MMW radar to improve measurement reliability and reduce depth uncertainty, which enhances depth measurement confidence in the view transform by integrating RCS-derived reflectivity metrics. The occupancy-weighted radar branch prioritizes image regions with high-confidence radar returns, minimizing measurement noise in view transform operation. Furthermore, DDCFusion optimizes spatial measurement consistency in Bird’s-Eye-View (BEV) space by modeling cross-sensor dependencies through the Global Feature Slice Coordinate Attention (GFSCA) fusion module. Experimental validation on the VoD and TJ4DRadSet datasets demonstrates superior measurement accuracy, achieving 51.08% mAP on VoD and 34.61% mAP on TJ4DRadSet—outperforming existing methods in depth error reduction and robustness to sparsity. Ablation studies verify the measurement-centric design: RCS-guided diffusion improves small-object detection (e.g., pedestrians), while DBSCAN-based clustering refines large-object localization (e.g., vehicles). The network demonstrates significant improvements in depth accuracy and robustness to sparse inputs while maintaining competitive inference latency with 138ms.
Jiahao Chen 陈加昊
Master.
A master student of this laboratory, research interests include 3D Object Detection, Point Cloud Processing and 4D Millimeter Wave Radar.
Ziming Zhu 朱梓铭
PhD. Loyal listener of Jay Chou.
A doctoral student of this laboratory, research interests include Artificial Intelligence, Autonomous Driving Environment Perception, 3D Object Detection and Semantic Occupancy Prediction.
Zheng Shen 申正
Master.
A Master student of this laboratory, research interests include Artificial Intelligence, 3D Object Detection and Deep Learning.
Yu Zhu 朱煜
Professor. Experts in artificial intelligence and computer vision. Lab leader.
Leader of this laboratory, research interests include Artificial Intelligence, Computer Vision, Industrial controls, Digital Image and Video Processing, Machine learning, Deep Learning and Applications.